
ALMA: AUTONOMOUS LUNAR MANUAL ASSISTANT, 2007-2010
| Time Frame: | Very Near-Term, EMS, long-duration |
| Environment: | Sample Gathering from Rover in Rugged Terrain |
| Power: | Watts, Nuclear Battery |
| Material: | 10kg, 1m2/kg |
| Locomotion: | Tetrahedral |
| Challenges: | Long Duration Operation as Samplign Subsystem |
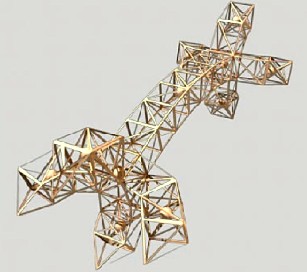
ALMA would be available as a manual assistant (arm) sample gathering subsystem on an existing rover for either the Moon or mars in support of the exploration initiative. Its tetrahedral locomotion occurs by continuous contraction and extension of struts in a way that optimizes the dexterity and movement across a terrain without the limits of present arms. Samples could be gathered directly by the rover, or the arm could detach to fetch more remote samples. In this way, samples could be gathered from structures not accessible to the rover, including holes and ledges, as interest dictates. The arm could even carry a small in situ instrument payload. Such a tetrahedral subsystem would act as a demonstration of the technology in preperation for construction of a tetrahedral rover. A dynamical model of the arm was built by 2005 summer students.
